
IEEE Very Small Size Soccer

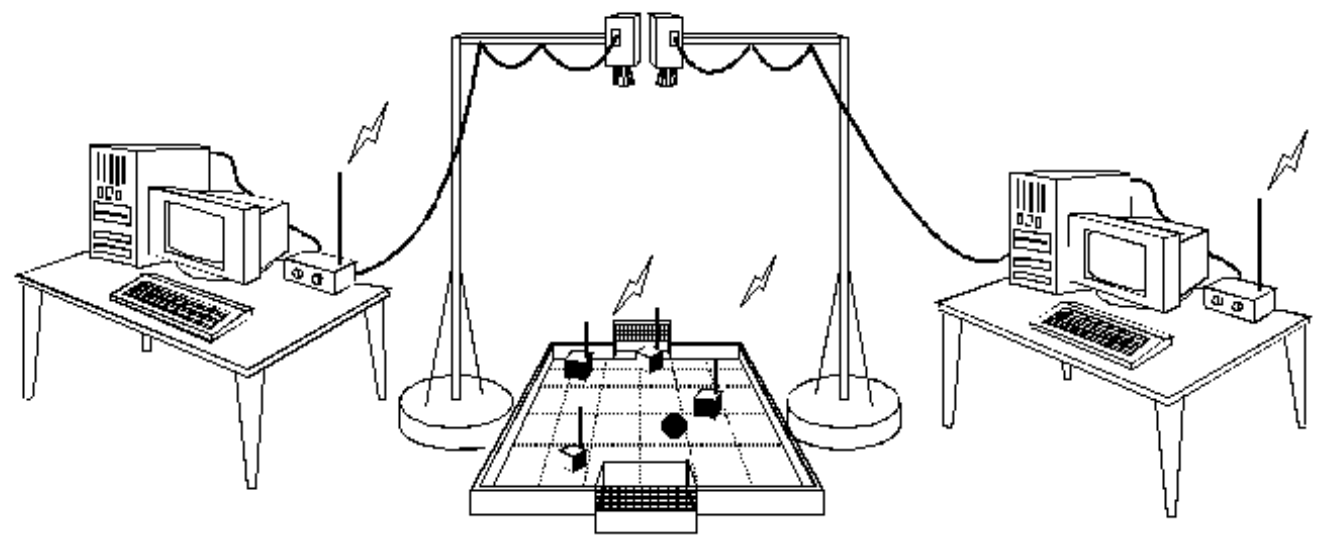
A categoria se trata de uma competição de futebol de robôs. Essa categoria está presente em competições como a Competição Brasileira de Robótica (CBR) e a Competição Latino-Americana de Robótica (LARC). Nessa competição, dois times teleoperados de três robôs se enfrentam em uma partida de futebol. Cada equipe é responsável por desenvolver todo o software e hardware para controlar seus robôs, utilizando uma câmera posicionada no centro do campo (2 a 2.5m de altura) para executar algoritmos de visão computacional que reconhecem as posições dos robôs e determinam as ações a serem executadas.
As principais regras incluem:
- Campo: 150cm x 130cm com paredes de 2.5cm de altura
- Gols: 10cm x 40cm extrapolados da dimensão do campo
- Robôs: Dimensão máxima de 7.5cm³ com tolerância de 0.5cm³ para proteção
- Obstrução da bola: Máximo de 30% da área visível
Consulte as regras completas em inglês ou regras em português.